NECは2024年2月19日、不規則に配置した物品に対し、精密なハンドリング作業が可能なロボットAI技術を開発したと発表した。物品や障害物の陰に隠れている領域やロボットの動作結果を予測して、人手で行っていたハンドリング作業をロボットで代替可能にする。2024年度中に、物流倉庫など人手作業が多く残る現場において同技術の実証を進める。
NECは、整理せずに不規則に配置した物品に対し、精密なハンドリング作業が可能なロボットAI技術を開発したと発表した。物品や障害物の陰に隠れている領域やロボットの動作結果を予測して、人手で行っていたハンドリング作業をロボットで代替可能にする(写真1、図1)。
 写真1:ロボットAIが隠れて見えない物品形状を推測する(出典:NEC)
写真1:ロボットAIが隠れて見えない物品形状を推測する(出典:NEC)拡大画像表示
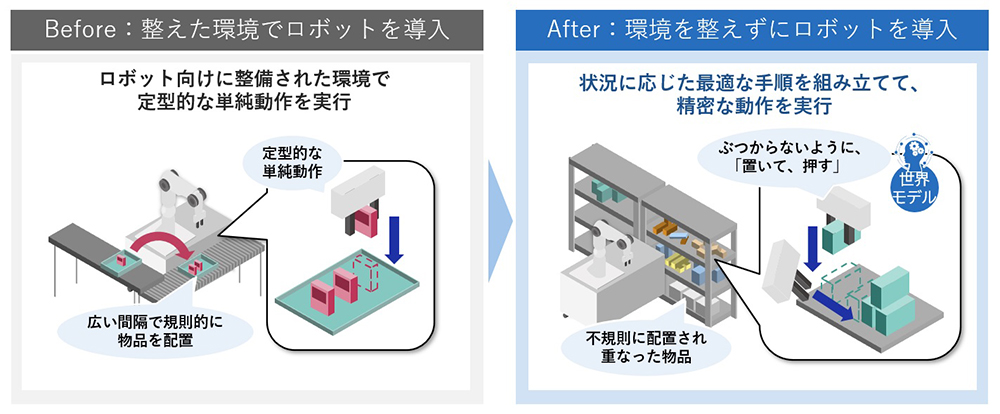 図1:不規則に配置した物品を自律的かつ高度にハンドリングする(出典:NEC)
図1:不規則に配置した物品を自律的かつ高度にハンドリングする(出典:NEC)拡大画像表示
「物流倉庫や工場などでロボットや大規模設備の導入による自動化のニーズが高まっている。しかし、既存の技術では物品や障害物を不規則に配置した環境を正しく認識するのが難しく、ロボットの導入は、環境を整えやすい単純な定型作業などに限定されている」(NEC)
上記のような背景からNECは、映像を物体単位で解釈する「世界モデル」を応用したロボットAI技術の開発に取り組んでいる。今回、ロボットが映像データから作業環境や自身の動作結果を高精度に予測する「時空間予測」と、これに基づいて精密な動作を自動生成する「ロボット動作生成」の両技術を開発した。
時空間予測とロボット動作生成が高度なハンドリングを可能に
現場で人手で行うハンドリング作業は複数の動作の組み合わせによって実行している。「例えば、物品の詰め込み作業で人は、「物品を置いて押す」といった動作を、他の物品や障害物にぶつからないように瞬時に組み合わせて実行している」(同社)。
一方、ロボットの場合、「押す」「引く」などの動作は、動作や物品形状の僅かな変化で物品の動きが大きく変わるため、「掴む」「置く」ような動作に比べて高精度に実行させることが困難だった。「また、考慮する動作の種類が増えると、動作の組み合わせや順序が複雑になり、リアルタイムに計画することにも課題があった」(同社)。
今回開発した時空間予測およびロボット動作生成技術は、映像データからロボットの動作に対する物品の動きを予測するモデルを学習し、「押す」「引く」を実行する。また、作業環境に応じた適切な動作順序を高速に生成することで、「置いて、押す」「引いて、取る」といった複数動作の組み合わせを自律的かつリアルタイムに実行する。
●Next:世界モデルを応用し、隠れた物品形状予測モデルを効率的に学習
会員登録(無料)が必要です


























